







Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
In an information acquisition system, the sensor is usually at the front of the system, the first of the detection and control systems. It provides the raw information necessary for system processing and decision making. Therefore, the accuracy of the sensor is critical to the overall system. In the measurement of displacement, velocity and acceleration, the differential transformer type sensor is often used because of its high sensitivity, good linearity and supporting integrated circuits, but the traditional LVDT sensor requires too much stability and accuracy for the working power supply, and Most of the circuit boards are made up of separate components, which are prone to looseness and moisture deterioration, which affects the service life and overall performance of the sensor. This paper introduces an LVDT linear displacement sensor based on AD598 signal processing chip, and discusses its error and precision by examples.
1 Basic principles
A differential transformer type sensor is a device that realizes measurement by utilizing changes in the self-inductance or mutual inductance of a coil, and its core is a variable self-inductance or a variable mutual inductance. The variable air gap differential transformer type inductive sensor used in this paper uses the change of mutual inductance to work.
1.1 Basic structure and working principle
There are one excitation coil and one output coil on the upper and lower iron cores. The upper and lower excitation coils are connected in series and then connected to the AC excitation power supply voltage Uin, and the two output coils are reversely connected in series according to the potential. Ignore the high-order infinitesimal quantity. When ωR(ω is the frequency of the AC excitation power supply voltage Uin and R is the equivalent resistance of the excitation coil), it can be derived.
Where: Uin is the excitation power supply voltage (unit V); Uout is the output voltage (unit V); N1, N2 are the turns of the excitation coil and the output coil respectively; △ δ is the distance of the axis offset balance position (unit: mm) ; δ accounts for the air gap size (in mm) when the axis is in equilibrium.
When the shaft is at the intermediate position, δ1 = δ2 = δ, and alternating magnetic fluxes φ1 and φ2 are generated in the exciting coil, and an alternating current induced potential is generated in the output coil. Since the air gaps on both sides are equal and the magnetic reluctance is equal, φ1=φ2, the potential E21=E22 induced in the output coil, since the secondary is connected in reverse by the potential, the output voltage Uout=0. When the axis deviates from the intermediate position, the air gaps on both sides are not equal (ie, δ1 ≠ δ2), and the potentials induced in the output coil are no longer equal (ie, E21 ≠ E22), and the voltage Uout is output. The size and phase of the Uout depends on the magnitude and direction of the displacement of the shaft.
1.2 Output characteristic equation
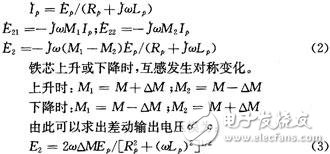
The primary side excitation voltage of the differential transformer is Ep, the angular frequency is ω, the current is Ip, the inductance is Lp, and the equivalent resistance is Rp. The secondary voltages are E21 and E22, respectively, and the mutual inductance is M1 and M2. If you ignore the effects of hysteresis eddy currents and coupling capacitors, you can conclude that:
2 sensor measurement circuit
AD598 is a new LVDT dedicated signal processing chip introduced by Analog Device. The schematic diagram is shown in Figure 2. As can be seen from the figure, the chip mainly consists of two parts: one part is a sine wave generator, its frequency and amplitude can be determined by a few external components; the other part is the signal processing part of the LVDT secondary. Through this part, a DC voltage signal proportional to the displacement of the core is generated. The AD598 can drive up to 24 V, LVDT primary windings in the frequency range of 20 Hz to 20 kHz, and accepts a minimum of 100 mV secondary input, making it suitable for many different types of LVDTs.
3 measurement system error analysis
The error of the measurement system can be divided into two categories: fixed error and random error.
3.1 Fixed error
Fixed error refers to the error caused by the structure of the differential transformer (machining accuracy) and the material (hysteresis eddy current). This is a comprehensive consideration of the accuracy requirements and economic indicators of the measurement in the system demonstration. Once the system is determined, these factors are generally not changeable.
3.2 Random error
The random error can be divided into the error caused by the fluctuation of the excitation source and the error caused by the phase sensitive detection according to the error source. Because the AD598 encapsulates the oscillator, LVDT and phase sensitive demodulator, it not only improves the integration of the product, but also greatly reduces the number of external components, so that the performance of the sensor is greatly improved. Therefore, it is not correct in this paper. The error caused by phase sensitive detection is derived.
Wyślij je do tym dostawcy

Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.